
Stefan Vorndran • PI (Physik Instrumente) L.P.
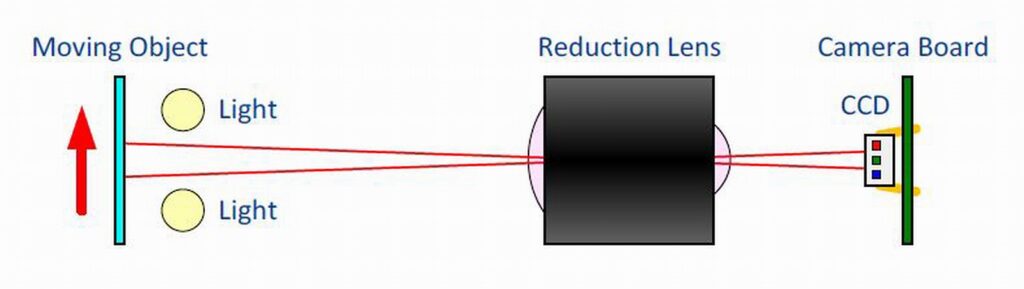
Air bearings are common in scanning applications. Scanning involves moving either a work-piece or an optic at a constant velocity, while a reading or writing operation takes place. Such operations include printing and image-setting (writing) and imaging (reading). While the physical act of writing an image or capturing an image differ by application and industry, all such applications share a common requirement – maintaining a constant velocity.
In most applications, the image capture or creation operation takes place at a constant frequency, such as frames per second in a camera. As the optic and workpiece move relative to each other, the spatial separation between each frame must be constant in order not to distort or blur the image. This means that the relative velocity between the two must remain constant.
We will discuss several aspects of scanning performance – how it is specified and measured, what performance level is achievable, what can impact the performance, and why air bearings provide superior scanning performance.
Defining Scanning Performance
The two most common methods of defining and specifying scanning performance are based on either velocity or position. A velocity-based specification is often defined as a percentage error at a specific velocity. For example: 200 mm/ sec scan speed, 0.01% error.
A position-based specification is described in terms of position error at any point in time, also called following error. It means that the stage position cannot deviate from the planned motion trajectory by more than the error window during the entire scan. For example: 200 mm scan distance, 200 mm/sec scan speed, +\-0.1 micron following error.
Following error is a common term in the servo-controls domain. It is a general term used to define the position error between the commanded trajectory and the actual trajectory. In this article, we use the term in this way, but in the specific case of errors seen during the constant velocity scan move. We ignore the following errors seen during a contoured move, where trajectory changes, and therefore accelerations, are commanded by the controller.
A number of manufacturers prefer to use the position-based specification for scanning performance, as the errors are more directly measured using laser interferometry tools.
Air bearings for increased scanning performance
Air bearings perform well when compared to other options for one main reason: air bearings have no friction. An air bearing has no physical contact between moving parts and oats on a cushion of air. Therefore, air bearings do not need to overcome static friction in order to produce motion, and do not need to overcome dynamic friction to maintain motion. With the minor exception of drag forces created by aerodynamic drag from the surrounding atmosphere and viscous drag created by the shearing of the air bearing film, an air bearing system behaves exactly as Newton’s three laws of motion predict.

Mechanical bearings still have to contend with friction and noise. All mechanical bearings exhibit some level of static and dynamic friction that must be overcome by the drive and control system. Friction levels can change with temperature, lubrication, preload, speed, payload and wear. This makes friction behave in unpredictable and non-linear ways.
Further, the friction levels can vary widely from unit to unit. Mechanical bearings, especially those with reciprocal elements, also suffer from noise. As rolling elements (balls or rollers) exit the bearing groove, recirculate in their carrier, and then re-enter the bearing groove, audible noise can be heard. This noise varies with speed, and affects the motion pro le. Both friction and noise make it impossible for the servo- controls to maintain ideal scanning performance.
Frictionless Motors
Air bearing stages designed for scanning can be driven by a direct-drive linear motor. Linear motors, like air bearings, have no contacting moving parts, and therefore do not suffer from noise and friction issues. Traditional mechanical drive mechanisms, such as screws, worms, belts, and gears, all suffer from the same weaknesses as mechanical bearings: friction and noise. By coupling non-contact air bearings with non-contact linear motors, air bearing stages create friction-free motion perfect for scanning.

Other Impacts on Scanning Performance
Not all air bearing motion systems are created equal. Yes, the use of an air bearing and linear motor are necessary to scanning, but other design decisions will impact system performance as well. These factors must be considered and tradeoffs made during system design to determine how to best meet scanning performance specifications. These factors include: payload; system stiffness; motor design; encoder selection, resolution, and signal type; servo-controls and drives selection; cable track design; electrical noise isolation and wiring design; and vibration isolation and control.
Scanning performance levels
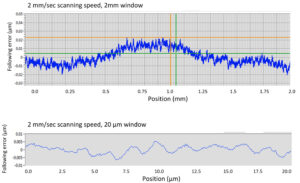
The level of achievable scanning performance will vary from system to system. However, the following is performance data captured from PIglide air bearing stages.This set of data is taken from a model A-110
This set of data is taken from a model A-110 PIglide LC linear air bearing stage with a 2μm incremental optical sine/cosine analog encoder with a glass scale. This encoder was chosen for its signal-to-noise quality. The stage is operated with an ACS SPiiPlus EC motion controller. Following
errors are below +\-20 nanome- ters at a scan speed of 2 mm/sec.
Over a small window of 20μm of travel, the following error is below
+\-10 nanometers.
This set of data is taken from a model A-322 PIglide HS Planar XY air bearing stage with absolute optical encoder, 1nm
BISS output, and steel scale. The stage is operated with an ACS SPiiPlus EC motion controller. Following errors are below +\-25 nanometers at a scan speed of 20 mm/sec, and below +\-100 nanometers at a scan speed of 250 mm/sec.
It can be seen that following error does increase with scanning speed, but not at the same rate. In the plots above, the speed is increased 12.5x while the following error only increased 4x. Performance levels, such as this, are simply not possible with mechanical bearing technologies.
